{kind=link}
{kind=link}
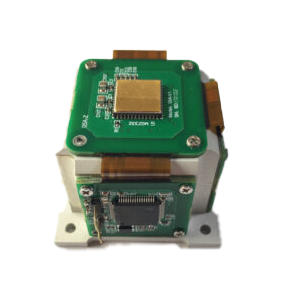
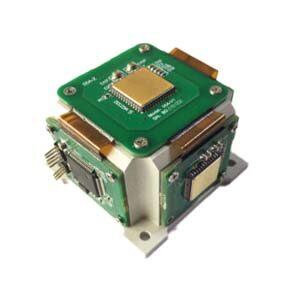
ER-MIMU-M01A Высокопроизводительный MEMS-модуль IMU
Вступление
ER-MIMU-M01A Высокопроизводительный MEMS IMU M01A представляет собой миниатюрный высокоточный инерционный элемент, содержащий информацию о трехосевом гироскопе и трехосевом акселерометре. Температурная компенсация осуществляется за счет стабильности смещения и масштаба каждой оси для повышения точности измерений.
Особенности
Миниатюрный IMU
Низкое энергопотребление
Высокая экономичность
Полная температурная компенсация
Приложение
Инерциальная навигация: инерциальное наведение, интегрированная навигация, устойчивость платформы
Краткосрочная навигация: управление полетом, баллистическая коррекция, телеметрия и дистанционное управление
Управление ориентацией: беспилотный летательный аппарат, ориентация антенны
Технические характеристики
| Гироскоп | |
| Диапазон измерения | ±450°/s |
| Полное смещение температуры | ≤100°/h |
| Случайное блуждание под углом | ≤0.15°/ √h |
| Нестабильность смещения | ≤2°/h |
| Стабильность смещения (1σ) | ≤8°/h |
| Повторяемость смещения (1σ) | ≤8°/h |
| Нелинейность масштабного коэффициента | ≤50ppm |
| Пропускная способность (10~250Hzрегулируемый) | 150Hz |
| Акселерометр | |
| Диапазон измерения | ±10g |
| Полное смещение температуры | ≤2mg |
| Оценить случайное блуждание | ≤0.025m/s/√h |
| Нестабильность смещения | ≤0.02mg |
| Стабильность смещения (1σ) | ≤0.2mg |
| Повторяемость смещения (1σ) | ≤0.2mg |
| Нелинейность масштабного коэффициента (±1g) | ≤200ppm |
| Полоса пропускания (регулируется от 10 до 250 Гц) | 150Hz |
| Система | |
| Подача напряжения | 5V±0.3V |
| Диапазон рабочих температур | -45℃~+85℃ |
| Ударопрочность | ≥2000g |
| Вибрация | ≥20grms |
| Размер | 23mm×23mm×10mm |
| Вес | ≤30g |
| Тип интерфейса(--) | RS422 |
| Соединитель(--) | JMC-1284Z2-JH |
| Определение подключения выходного интерфейса | |
| VCC(+5V) | Положительный источник питания |
| GND | Заземление источника питания |
| Rx+ | RS422 получать + |
| Rx- | RS422 получать - |
| Tx- | RS422 посылать - |
| Tx+ | RS422 посылать + |
Размеры

Методы нанесения
1.В чем разница между MEMS и FOG IMU?
2.Каковы сценарии применения IMU?
3.Инерциальный измерительный блок
4.Исследование по моделированию ошибок MEMS IMU и технологии температурной компенсации
6.Принцип работы IMU и рекомендации по использованию IMU тактического класса
Больше продуктов