{kind=link}
{kind=link}
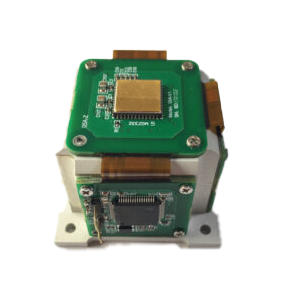
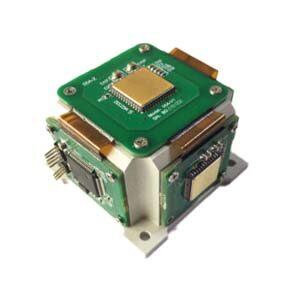
ER-MIMU-M02 Высокопроизводительный MEMS-модуль IMU
Вступление
ER-MIMU-M02 - это инерциальный измерительный прибор (IMU), основанный на микромеханической технологии (MEMS), включающий встроенный MEMS-гироскоп со стабильностью смещения 2°/ч (по Аллану) и MEMS-акселерометр со стабильностью смещения 100 мкг (по Аллану), который выдает трехосевое угловое значение скорость и трехосевое ускорение, трехосевой магнитометр и барометр.
Продукт отличается высокой надежностью и высокой адаптируемостью к окружающей среде. То есть его можно широко использовать в таких областях, как беспилотные летательные аппараты, интеллектуальные бомбы, системы самонаведения, ракетные снаряды и устойчивые платформы.
Особенности
Трехосевой цифровой гироскоп:
Диапазон динамических измерений ±450º/с;
Нестабильность смещения: 2º/ч (дисперсия Аллана);
Случайное отклонение по углу: 0,1º/√ч.
Трехосевой цифровой акселерометр:
Динамический диапазон измерений: 18g;
Стабильность смещения: 0,1 мг (дисперсия Аллана);
Угловое случайное блуждание: 0,02 м/с√ч;
Высокая надежность: среднее время наработки на отказ>20000 ч;
Гарантируйте точность во всем диапазоне температур (-40 ℃ ~ 75 ℃): Встроенный высокопроизводительный алгоритм калибровки и компенсации температуры;
Поддержка стабильного применения платформы: измерение всех параметров и полоса пропускания измерений > 100 Гц;
Интерфейс включает 1-канальный SPI и 1-канальный UART.
Технические характеристики
| Параметр | Условие тестирования | Минимальное значение | Типичное значение | Максимальное значение | Единица измерения |
| Гироскоп | |||||
| Динамический диапазон измерений | / | ±400 | ±450 | º/s | |
| Стабильность смещения | Дисперсия Аллана | / | 2 | / | º/h |
| Случайное блуждание | / | / | 0.1 | º/√h | |
| Повторяемость смещения | Полная температура | / | ±0.1 | 0.2 | º/s |
| Повторяемость масштабного коэффициента | Полная температура | / | 0.5 | 1 | % |
| Нелинейность масштабного коэффициента | FS=450 º/s | / | 0.1 | 0.2 | %FS |
| Пропускная способность | / | / | / | 400 | Hz |
| Акселерометр | |||||
| Динамический диапазон измерений | / | / | 18 | / | g |
| Стабильность смещения | Дисперсия Аллана | / | 0.1 | / | mg |
| Повторяемость смещения | Полная температура | / | 10 | 32 | mg |
| Повторяемость масштабного коэффициента | Полная температура | / | ±0.5 | ±1 | % |
| Нелинейность масштабного коэффициента | FS=16g | / | 0.2 | / | %FS |
| Пропускная способность | / | / | / | 200 | Hz |
| Магнитометр | |||||
| Динамический диапазон измерений | / | / | ±2 | / | гаусс |
| Чувствительность | / | / | 0.1 | / | мгусс/LSB |
| Начальная ошибка чувствительности | / | / | 2 | / | % |
| Температурный коэффициент чувствительности | / | / | 250 | / | ppm/℃ |
| Степень нелинейности | / | / | / | 1 | % of FS |
| Начальная ошибка смещения | / | / | 400 | / | мгаусс |
| Парциальный температурный коэффициент | / | / | 0.7 | / | мгаусс/℃ |
| Выходной шум | / | / | 4 | / | мгаусс |
| Плотность шума | / | / | 1 | / | мгаусс/√Hz |
| Пропускная способность | / | / | 50 | 200 | Hz |
| Барометр | |||||
| Диапазон давлений | расширение | 450 | / | 1100 | мбар |
| 50 | / | 1200 | мбар | ||
| Общая погрешность | / | / | 6.0 | / | / |
| Долгосрочная стабильность | / | / | 1 | / | мбар/год |
| Коммуникационный интерфейс | |||||
| 1 способ SPI | Скорость передачи данных в бодах | / | / | 15 | MHz |
| 1-полосный интерфейс UART | Скорость передачи данных в бодах | 9.6 | 230.4 | 921.6 | Kbps |
| Электрические характеристики | |||||
| Напряжение | / | 3 | 3.3 | 3.6 | V |
| Рассеиваемая мощность | / | / | / | 1.5 | W |
| Волна пульсации | P-P | / | / | 10 | mV |
| Структурные характеристики | |||||
| Измерение | 47×44×15mm | ||||
| Вес | / | 41 | 42 | 47 | g |
| Операционная среда | |||||
| Рабочая температура | / | -40 | 75 | ℃ | |
| Температура хранения | / | -45 | 80 | ℃ | |
| Вибрация | / | / | 3g,10~2000Hz | / | / |
| Влияние | / | / | 30g, 11ms | / | / |
| Среднее время наработки на отказ | / | / | 20000 | / | h |
| Надежность | |||||
| Непрерывное рабочее время | / | / | 120 | / | h |
Методы нанесения
1.В чем разница между MEMS и FOG IMU?
2.Каковы сценарии применения IMU?
3.Инерциальный измерительный блок
4.Исследование по моделированию ошибок MEMS IMU и технологии температурной компенсации
6.Принцип работы IMU и рекомендации по использованию IMU тактического класса
Больше продуктов